
Hệ thống học sâu mới giúp robot mềm tự học cách di chuyển chỉ bằng một camera
Các nhà khoa học Mỹ đã phát triển một loại robot mềm mới có khả năng tự học cách di chuyển chính xác chỉ từ một hình ảnh, mở ra hướng tiếp cận đơn giản, linh hoạt và ít tốn kém hơn.
Các robot truyền thống hiện được sử dụng phổ biến trong công nghiệp và môi trường nguy hiểm thường có thiết kế bằng vật liệu cứng và dễ kiểm soát, nhưng lại thiếu linh hoạt để hoạt động hiệu quả trong không gian chật hẹp hay địa hình gồ ghề. Trong khi đó, các robot mềm lấy cảm hứng từ sinh học có khả năng thích ứng tốt hơn với môi trường và có thể di chuyển trong những nơi mà robot thường không thể tiếp cận. Tuy nhiên, để đạt được mức độ linh hoạt đó, chúng cần phải có hệ thống cảm biến phức tạp và mô hình điều khiển được thiết kế riêng biệt cho từng dạng robot, dẫn đến việc triển khai và mở rộng ứng dụng trở nên tốn kém và khó khăn.
Khắc phục hạn chế đó, nhóm nghiên cứu tại Viện Công nghệ Massachusetts (MIT) đã phát triển một hệ thống điều khiển robot mềm hoàn toàn mới, sử dụng học sâu và chỉ cần một hình ảnh từ camera duy nhất để điều khiển chuyển động robot một cách chính xác. Công trình đã được công bố trên tạp chí Nature, đánh dấu bước tiến quan trọng trong hướng tiếp cận học máy trực quan, ít tốn tài nguyên và phù hợp hơn với việc triển khai thực tế.
Bằng cách huấn luyện mạng nơ-ron sâu trong khoảng 2–3 giờ với video đa góc quay các chuyển động ngẫu nhiên của các robot khác nhau, hệ thống học sâu có khả năng tái tạo hình dạng và phạm vi chuyển động của robot từ một hình ảnh đơn lẻ. Đây là điểm khác biệt so với các hệ thống học máy trước đây, vốn đòi hỏi hệ thống ghi hình chuyển động đắt đỏ và quy trình hiệu chỉnh phức tạp cho từng robot riêng lẻ. Bên cạnh đó, phương pháp mới sẽ giúp tách rời thiết kế phần cứng robot khỏi sự phụ thuộc vào mô hình hóa thủ công, tối ưu hóa chi phí và thời gian sản xuất.
Nhóm nghiên cứu cho biết, trong quá khứ, việc thiết kế robot thường phụ thuộc vào sản xuất chính xác, vật liệu đắt tiền, cảm biến dày đặc và các khối cấu trúc cứng. Vì vậy với cách tiếp cận mới, điều đó không còn là rào cản.
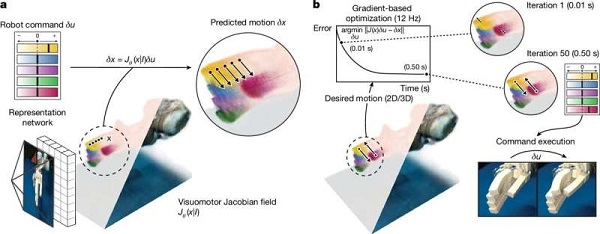
Hình ảnh minh họa quá trình điều khiển robot mềm bằng thị giác và học máy: a) Từ một hình ảnh đầu vào, mô hình học máy tái tạo trường Jacobian thị giác–vận động (visuomotor Jacobian field) – một biểu diễn 3D mô tả hình dạng và động học của robot. Trường này cho phép dự đoán chuyển động 3D của các điểm trên bề mặt robot dưới mọi lệnh điều khiển có thể. Màu sắc thể hiện mức độ nhạy cảm của từng điểm với các kênh điều khiển.
b) Dựa trên chuyển động mong muốn trong không gian ảnh hoặc không gian 3D, hệ thống sử dụng trường Jacobian để tối ưu lệnh điều khiển tương ứng và thực thi ở tốc độ tương tác khoảng 12 Hz. Thử nghiệm thực tế xác nhận robot thực hiện đúng chuyển động đã định.
Nguồn: Nature (2025), DOI: 10.1038/s41586-025-09170-0.
Hệ thống đã được thử nghiệm thành công trên nhiều dạng robot mềm khác nhau, bao gồm bàn tay khí nén in 3D, cổ tay mềm có cấu trúc auxetic, bàn tay 16 bậc tự do (DOF) Allegro, và cánh tay robot Poppy giá rẻ. Kết quả cho thấy sai số trong chuyển động khớp dưới 3 độ và sai số vị trí đầu ngón tay dưới 4 mm – một độ chính xác cao đáng kể đối với các hệ thống robot mềm. Đặc biệt, hệ thống có thể tự động hiệu chỉnh theo chuyển động của robot và sự thay đổi trong môi trường xung quanh, thể hiện khả năng thích nghi linh hoạt.
Theo nghiên cứu sinh tiến sĩ Sizhe Lester Li (MIT), công trình này đánh dấu một bước chuyển trong tư duy chế tạo robot: từ lập trình truyền thống sang “dạy” robot học cách hành động. “Hiện nay, nhiều nhiệm vụ trong robot yêu cầu kỹ thuật và lập trình phức tạp. Trong tương lai, chúng tôi kỳ vọng chỉ cần cho robot thấy mục tiêu cần làm và để nó tự học cách hoàn thành.”
Tuy nhiên, nhóm nghiên cứu cũng thừa nhận rằng hệ thống hiện tại vẫn còn giới hạn khi thực hiện các nhiệm vụ cần tiếp xúc vật lý hoặc thao tác xúc giác, vì chỉ dựa vào hình ảnh đầu vào. Trong môi trường thiếu thông tin thị giác hoặc cần cảm biến xúc giác chính xác, hiệu quả của hệ thống có thể suy giảm. Do đó, các cảm biến bổ sung như cảm biến lực, cảm biến xúc giác có thể được tích hợp để nâng cao khả năng thực hiện các tác vụ phức tạp hơn.
Dù vậy, với khả năng điều khiển chính xác chỉ bằng một camera, phương pháp học sâu này mở ra tiềm năng lớn trong việc tự động hóa điều khiển nhiều loại robot mềm khác nhau, kể cả những hệ thống không có hoặc có rất ít cảm biến tích hợp. Đây là một bước tiến quan trọng trong việc biến robot mềm trở thành công cụ hiệu quả và dễ triển khai hơn trong thực tế.
Nguồn: Techxplore.com
- Mỹ chuyển giao công nghệ giám định ADN cho Việt Nam (11/07/2025)
- 5G tác động thị trường smartphone Việt thế nào (11/07/2025)
- Điểm nhấn iTECH EXPO 2025: Chuyển đổi số toàn diện cho chính quyền phường, xã (11/07/2025)
- Pin mặt trời siêu mỏng có thể mang trên người (10/07/2025)
- Tủ giữ đồ thông minh, nhận hàng ship bằng tin nhắn, QR Code (10/07/2025)
- Sáu gương mặt trẻ đại diện Việt Nam dự chung kết thế giới MOSWC 2025 tại Hoa Kỳ (10/07/2025)
- Nghiên cứu hiệu quả điều trị bệnh từ cây vông nem (09/07/2025)
- Hơn 120 doanh nghiệp công nghệ tham gia Triển lãm iTECH EXPO 2025 (09/07/2025)
- Việt Nam - Lào hợp tác phát triển khoa học công nghệ (08/07/2025)
- Công nghệ chụp ảnh giúp robot phát hiện hàng lỗi (08/07/2025)









